

TerraScan User Guide
Deduce trajectories
Deduce trajectories command creates approximate trajectories based on the point cloud. This requires that points are loaded into TerraScan and time stamps must be available. The deduced trajectory files store the a time, XYZ positions as well as a heading value.
You can use this method, if no trajectory information is available for import. The deduced trajectory allows processes for the point clouds that rely on trajectory information, such as cut overlap, classify by range, compute normal vectors towards the direction of the trajectory, etc..
To deduce trajectories from points:
1. Set a directory for storing trajectories.
2. Load the point cloud into TerraScan.
3. Select Deduce trajectories from the File pulldown menu.
The Deduce Trajectories From Points dialog opens:
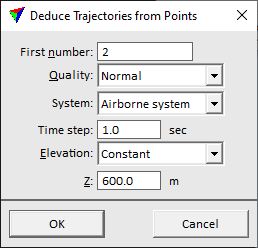
4. Define settings and click OK.
This sorts the points by time stamps and deduces the trajectory information. The command writes TerraScan trajectory binary file(s) into the active trajectory directory. The name of a file is determined by the start and end time of the deduced trajectory. When the process has finished, a message is displayed that informs about the amount of created trajectories.
SETTING |
EFFECT |
|---|---|
First number |
Number of the first deduced trajectory. Additional trajectories are numbered increasingly. |
Quality |
Quality attribute assigned to the trajectories. |
System |
Scanner system assigned to the trajectories. This may add lever arm corrections to trajectory positions and thus, effect the computation of the scanner location at the moment of measuring a laser point. |
Time step |
Time interval from which the average XYZ of points is computed and thus, a trajectory position is derived. |
Elevation |
Altitude of the trajectory: •Constant - absolute height of the trajectory. •Dz from points - relative height difference from the point cloud. |
Z |
Absolute height value of the trajectory. This is active only if Elevation is set to Constant. |
Dz |
Height difference value of the trajectory from the point cloud. The value is added to the average Z value computed from the points in one Time step. This is active only if Elevation is set to Dz from points. |
The command sorts the loaded points by time stamp and thus, modifies the points in memory. If you want to save the modification permanently, save the points into a file.