

TerraScan User Guide
Read points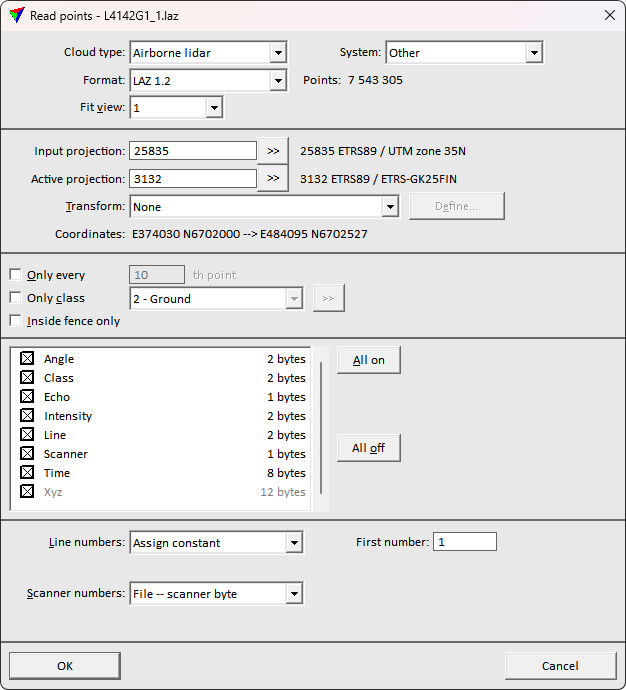
Read points command loads points from files into TerraScan for visualization or processing tasks. It performs exactly the same action as the Load Airborne Points tool.
More information about file formats that can be read into TerraScan can be found in Section Supported file formats and File formats / User point formats category of TerraScan Settings.
You can load several files of the same file format together in one reading process. The file format is automatically recognized if it is known by the software. The points of the selected file(s) are loaded into TerraScan memory. You can add more points by loading additional files. If the memory is full, the software shows an error message and the reading process stops.
To load points from files into memory:
1. Select Read points command from the File pulldown menu.
This opens the Read points dialog, a standard dialog for selecting files.
2. Select files and click Open.
This opens the Load points dialog.
3. Select the correct Cloud type. This is recommended in order to optimize the processing speed for many automatic routines.
4. Define other settings and click OK.
This loads the points into the memory and displays them on the screen.
SETTING |
EFFECT |
|---|---|
Cloud type |
Type of the point cloud related to the way of how the point cloud is produced: •Airborne lidar - point cloud captured by an airborne laser scanner system. The system is carried by flying vehicle. •Mobile lidar - point cloud captured by a mobile laser scanner system. The system is carried by a ground-based vehicle. •Stationary lidar - point cloud captured by a static terrestrial laser scanner system. The scanner is mounted on a static device such as a tripod. •Airborne photo - photogrammetric point cloud generated from airborne images. The images are captured from a flying vehicle. •Mobile photo - photogrammetric point cloud generated from mobile images. The images are captured from a ground-based vehicle. •Stationary photo - photogrammetric point cloud generated from static terrestrial images. The images are captured by a static camera mounted on a tripod. •Boat sonar - point cloud captured by a sonar mounted on a boat. •Mixed - point cloud produced by different devices. The cloud type can be changed for loaded points by using the Cloud type command. |
System |
Scanner system model used to capture the data. If selected, processing parameters are optimized for the selected system when applying Process drone data tool. |
Format |
Format of the point file. This is automatically recognized by the software. For user-defined text file formats, it might be necessary to select the correct format. |
Points |
Amount of points in all selected files. |
Fit view |
Defines which CAD file view is fitted to the extent of the loaded points: •None - no view is fitted. •All - all open views are fitted. •1...8 - the selected view is fitted. Only numbers of open views are available. |
Input projection |
Projection system of the input data. Click on the >> Button to open the Browse for Projection System dialog. The dialog provides a search option for projection systems as well as a list of all implemented systems. In addition, any user-defined projection systems are included in the list. |
Active projection |
Projection system of the data for processing. Click on the >> Button to open the Browse for Projection System dialog. The dialog provides a search option for projection systems as well as a list of all implemented systems. In addition, any user-defined projection systems are included in the list. |
Transform |
Additional transformation applied to points during the reading process. The list contains transformations that are defined in Coordinate transformations / Transformations category of TerraScan Settings. |
Coordinates |
Easting and Northing coordinate values of the first point found in the point cloud. The first values are coordinates in the Input projection system, the second values in the Active projection system or after an additional transformation has been applied. If the values are the same, no transformation is applied. |
Only every |
If on, only a selection of points is loaded. The software reads every n th point from the file(s), where n is the given number. |
Only class |
If on, only points from the selected class(es) are loaded. |
|
Opens the Select classes dialog which contains the list of active classes in TerraScan. You can select multiple source classes from the list that are then used in the Only class field. |
Inside fence only |
If on, only points inside a fence or selected polygon are loaded. |
Attributes |
Attributes that are loaded for laser points. Switch on attributes that you want to read in. Only attributes that are stored in the point file(s) are available for loading. All on and All off buttons switch the selection of all attributes on or off. Point coordinates are always required. The extra attributes names are indicated by quotation marks. |
Line numbers |
Defines, how line numbers are assigned to the points during the loading process: •Use from file - line numbers from source files are used. •Assign constant - the number given in the First number field is assigned to all points. •First number in name - the first numerical sequence in a file name is used as line number. •Last number in name - the last numerical sequence in a file name is used as line number. •First number in folder - the first numerical sequence in the name of the folder containing the input files is used as line number. •Last number in folder - the last numerical sequence in the name of the folder containing the input files is used as line number. •Deduce using time - numbers are assigned based on trajectories loaded into TerraScan. The same process can be performed for by the Deduce using time command or the corresponding macro action. •Increase by xy jump - the line numbers increase from the given First number if the xy distance is bigger than the value given in the By distance field. •Increase by time jump - the line numbers increase from the given First number if a jump in time stamps occurs. This requires that trajectory information is available in TerraScan. •Increase by file - the line numbers increase from the given First number for each separate file. •Increase by file name - the line numbers increase from the given First number for each file with another file name. Files with the same name get the same number. •Increase by directory - the line numbers increase from the given First number for each file stored in another source folder. Files from the same source folder get the same number. The Line numbers settings are only available if the Line attribute is switched on for loading. |
Scanner number |
Defines, how scanner numbers are assigned to the points during the loading process: •File -- scanner byte - scanner number stored in the 8-bit user data field is used. This is the normal way of storing a scanner number. •File -- scanner channel - scanner number stored in 2-bit scanner channel field of LAS/LAZ 1.4 files is used. This may be relevant for LAS/LAZ 1.4 files only. •Assign constant - the number given in the First number field is assigned to all loaded files. •Increase by file - the scanner numbers increase from the given First number for each separate file. •First number in name - the first numerical sequence in a file name is used as scanner number. •Last number in name - the last numerical sequence in a file name is used as scanner number. •First number in folder name - the first numerical sequence in the name of the folder containing the point files is used as scanner number. •Last number in folder name - the last numerical sequence in the name of the folder containing the point files is used as scanner number. •Deduce using time - numbers are assigned based on trajectories loaded into TerraScan. •From line number - the line number is used as scanner number. The Scanner number settings are only available if the Scanner attribute is available and switched on for loading. |
Default |
Point class to assign to all points if no class attribute is stored in the point file. This is active only if file format with no mandatory class information is selected for loading. |

The point file(s) may include classes that are not defined in the active class definition in TerraScan. In this case, a temporary class is added to the active class definition for any missing class. The temporary class gets a default description according to its class number, for example “class 0” for a temporary class number 0. Any temporary class is deleted if the points are unloaded. You can store a temporary class permanently by using the Define Classes tool.