

TerraScan User Guide
Deduce scanner positions
Deduce scanner positions command creates trajectory information for tripod mounted scanner data. It offers two alternative approaches for calculating the scanner positions. The different methods suit for different data types:
•Multiple echo vectors: scanner produces multiple echos for single laser pulse, and echo numbers are stored as attribute values. The software deduces the scanner positions from the intersection point of the laser beams.
OR
•Hole in point cloud: scanner appears as a circular void area without points. The software assumes that the scanner is located in the center of the void area. The routine computes the average XY position of points in one line and then searches for the void area. The process may fail if a scanner position is close to a wall or if the void area is not circular.
Each scan position must have unique line number in the point cloud. The line information is used to separate one scanner position from another, and assign names for the TRJ files storing the calculation result. The process creates one trajectory file for each scan position as output.
You can use this method, if no text file for scanner positions is available for import.
The deduced trajectory allows processes for the point clouds that rely on trajectory information, such as cut overlap, classify by range, compute normal vectors towards the direction of scanner, etc..
To deduce scanner positions:
1. Set a directory for storing trajectories.
2. Load the point cloud produced by the scanner. You may load point clouds from several scanner positions.
3. Select Deduce scanner positions from the File pulldown menu.
The Deduce Scanner Positions dialog opens:
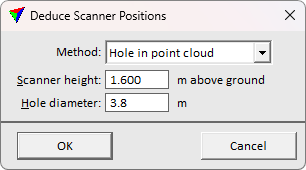
4. Define settings and click OK.
This writes the scanner positions as TerraScan trajectory binary file(s) into the active trajectory directory. The name of a file is determined by the line number.
SETTING |
EFFECT |
|---|---|
Method |
Calculation method to identify the scanner positions. Multiple echo vectors or Hole in point cloud. |
Scanner height |
Height of the scanner above the ground. This is active only if Method is set to Hole in point cloud. |
Hole diameter |
Diameter of the circular void area around the scanner position. This is active only if Method is set to Hole in point cloud. |