

TerraScan User Guide
By range
Not Lite
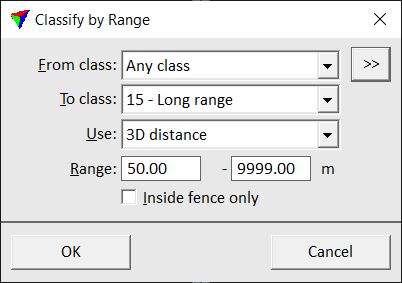
By range routine classifies points based on the range. The range is defined as the distance of a point from the scanner. The distance can be measured as 3D, horizontal, or vertical distance.
This classification routine is primarily used with laser data from mobile scanners and can be used, for example, to classify points at long ranges or points that are clearly below the ground level.
SETTING |
EFFECT |
|---|---|
From class |
Source class(es). |
|
Opens the Select classes dialog which contains the list of active classes in TerraScan. You can select multiple source classes from the list that are then used in the From class field. |
To class |
Target class. |
Use |
Defines how the range between a point and the scanner is measured: •3D distance - 3D distance. •Xy distance - horizontal distance. •Offset distance - left/right distance. •Forward distance - forward/backward distance. •Dz - vertical distance. |
Range |
Distance range. A point is classified, if it is within the given distance range from the scanner. |
Inside fence only |
If on, points inside a fence or selected polygon(s) are classified. |
