

TerraScan User Guide
Moving objects
Not Lite
Moving objects routine classifies groups of points that are captured from moving objects. It can be used for mobile laser data sets. The routine requires that data from multiple lines or scanners is available. It should be applied after data has been matched but before data from overlapping lines is cut off.
The following preparation steps should be performed before moving object detection (all available also as macro actions):
1. Classify hard surface on the road.
2. Compute distance from hard surface.
3. Classify 2-3 elevation steps above the road surface using the by distance routine (e.g. road low <0.5m, road medium 0.5-3.0m, road high >3.0)
4. Compute normal vectors for the 3 above-road classes. Use Turn normals = Towards trajectory and do not separate lines/scanners.
5. Assign groups for the road medium and road high classes. Use method Group by density, Gap = Automatic and a reasonable value for required points per group (depending on point density).
The routine classifies groups of points that are captured at one moment of time. At another moment of time, when the area was captured by another scanner or in another line, there are no points at the moving object's location but point from behind the moving object.
SETTING |
EFFECT |
|---|---|
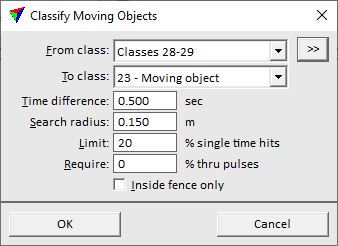
From class |
Source class(es). |
|
Opens the Select classes dialog which contains the list of active classes in TerraScan. You can select multiple source classes from the list that are then used in the From class field. |
To class |
Target class. |
Time difference |
Minimum time difference between points on the moving object and points from behind the moving object. |
Search radius |
3D radius around each point within which only points of the same group can be located. Points on a moving object are considered to belong to the same group. A group is classified if there are no points from another group or without a group number falling within the given search radius. |
Limit |
Controls how often the moving object was seen by scanner(s) and in different lines. In best case, the moving object is seen only once (i.e. in one line or by one scanner). The recommended value is 20% to accept some , a value of 0% would mean that all of the moving object was seen only once. |
Require |
Controls the required rate of laser beams that did not hit the moving object but went through. With 0% value processing does not validate thru pulses, saving in computation. With a bigger value the groups with smaller ratio are considered as static objects, while objects passing the required ratio are accepted. Pulse is considered passing through a group, if it returns a point from behind the object. The recommended value is 50%. |
Inside fence only |
If on, points inside a fence or selected polygon(s) are classified. |
