

TerraScan User Guide
Hard surface
Not Lite
Hard surface routine classifies ground points by creating a triangulated surface model iteratively. The routine classifies dominant median surface points. It is best suited for classifying ground in mobile laser data sets and in data sets where there is mainly hard ground surface, such as paved roads or other areas. For classifying ground in airborne data sets where the majority of ground is in natural terrain, use the Ground routine instead of the hard surface routine. If you need to classify both, natural terrain and paved areas, you may need to draw polygons around natural/paved areas in order to apply on of the routines inside the polygons and the other routine for the rest of the data.
In contrast to the ground routine, the hard surface routine is not sensitive to low error points in the point cloud. Therefore, you do not need to run any low point classification before classifying ground with this routine. However, you may run other routines in order to limit the amount of points in the source class for the hard surface routine.
The hard surface routine is eager to classify points that form a local plane. The Plane tolerance given in the routine’s settings determines how well the points must fit the plane. This is the main parameter controlling how many points are classified into the ground class.
SETTING |
EFFECT |
|---|---|
From class |
Source class(es). |
|
Opens the Select classes dialog which contains the list of active classes in TerraScan. You can select multiple source classes from the list that are then used in the From class field. |
To class |
Target class. |
Inside fence only |
If on, points inside a fence or selected polygon(s) are classified. |
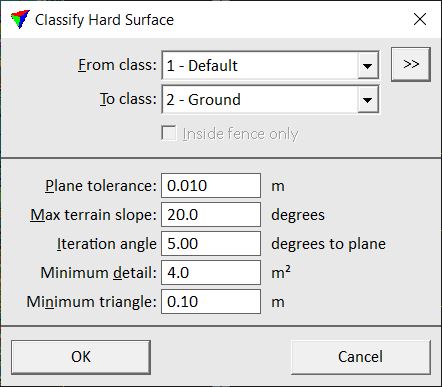
Plane tolerance |
Determines how well the points on a hard surface must fit a plane. |
Max terrain slope |
Maximum slope of the hard surface. |
Iteration angle |
Maximum angle between a point, its projection on the triangle plane and the closest triangle vertex. |
Minimum detail |
Minimum size of a continuous hard surface area. |
Minimum triangle |
Target detail size for surface classification. The iteration stops once triangle edge lengths fall below this limit. |

After running the automatic hard surface routine, there might be the need to improve the result of the classification manually. You may use half-automatic ways in order to do this task. One possibility is to run the hard surface routine on loaded points and inside a fence using the Inside fence only option of the routine.