

TerraScan User Guide
Measure Point Noise
 Measure Point Noise tool measures the point-to-point noise in a point cloud. The tool reports the average distance from a point to a plane fitted to its closest neighbors. The tool may use all points of a point cloud or only points in selected classes. The noise of a point cloud is best assessed from points on hard, open, close-to-horizontal surfaces.
Measure Point Noise tool measures the point-to-point noise in a point cloud. The tool reports the average distance from a point to a plane fitted to its closest neighbors. The tool may use all points of a point cloud or only points in selected classes. The noise of a point cloud is best assessed from points on hard, open, close-to-horizontal surfaces.
Point-to-point noise is measured calculating the spread of points. The tool reports the standard deviation of point offset from local surface plane evaluated using the surrounding points. In other words, the reported value is often one third of the point spread.
To measure the point-to-point noise:
1. Select the Measure Point Noise tool.
This opens the Measure Point Noise dialog:
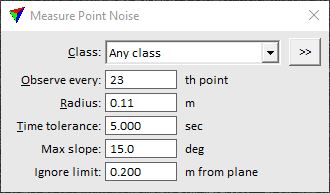
2. Define settings.
3. Place a data click anywhere in a CAD file view.
This displays the average point noise of loaded points.
SETTING |
EFFECT |
|---|---|
Class |
The point-to-point noise is computed for points of any class or of a specific class. The list contains the active class definitions in TerraScan. |
|
Opens the Select classes dialog which contains the list of active classes in TerraScan. You can select multiple source classes from the list that are then used in the Class field. |
Observe every |
Defines a subset of points that is included in the noise computation. The more points are used, the longer the process. |
Radius |
Circular area around a point within which the points are considered for fitting a plane. |
Time tolerance |
Only points within the given time difference are considered in the noise computation. A small time tolerance ensures that only points from the same path are used. Thus, any mismatch between paths does not influence the result. |
Max slope |
Maximum slope gradient of points considered in the computation. |
Ignore limit |
Points that do not fit to the plane within the given distance are ignored. |
