New Drone Project
Not Lite
New Drone Project command imports data that has been collected with UAV-mounted systems and pre-processed with system-specific software. The input data includes the LiDAR point cloud in LAS format and trajectory information. The import wizard performs the following steps:
•Creates a CAD file if not open already
•Fixes coordinate setup to match incoming points
•Reads laser points into memory applying a coordinate transformation
•(Optional) Sort points by xy location for speed improvement
•Classifies all points to class 1 – Default
•(Optional) Adjusts elevation values from ellipsoidal to orthometric
•(Optional) Creates a default list of point classes
•Fixes the scan direction bit
•Creates a folder and reads a trajectory solutions applying a coordinate transformation
•(Optional) Adjusts trajectory elevation values from ellipsoidal to orthometric
•Deduces line numbers for laser points
The import of input data may be system-specific. Currently, one UAV-Scanner system is implemented: DJI ZENMUSETM L1 developed and maintained by the company SZ DJI Technology Co., Ltd.. The system integrates LiDAR scanner, camera and IMU and thus, produces high-quality RGB-colored point clouds and trajectory information. In the future, more scanner systems may be implemented.
To create a new project for UAV point clouds:
1. Select New Drone Project command from the Wizard menu.
This opens the New Drone Project dialog:
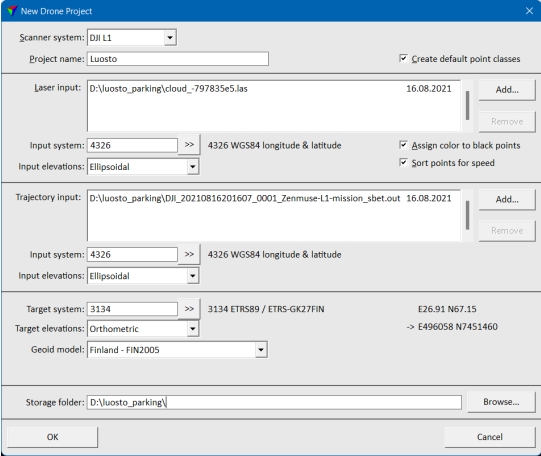
2. Define settings and click OK.
SETTING |
EFFECT |
|---|---|
Scanner system |
Scanner system used to capture the data: •DJI L1 - DJI ZENMUSETM L1 system. •Other - any other UAV scanner system. |
Project name |
Name of the new project. |
Create default point classes |
If on, the default class file is copied from the TerraScan installation folder to the project directory. |
Laser input |
Raw point cloud data provided by the system-specific software. Click on the Add button in order to select the input file(s) in a standard dialog. The expected format of the point cloud file is LAS. |
Input system |
Projection system of the input point cloud data. Click on the >> Button to open the Browse for Projection System dialog. The dialog provides a search option for projection systems as well as a list of all implemented systems. In addition, any user-defined projection systems are included in the list. |
Input elevations |
Elevation values of the input point cloud data: Ellipsoidal or Orthometric. Data collect with measurement systems is usually provided with ellipsoidal height values. |
Assign color to black points |
|
Sort points for speed |
If on, points are sorted by XY coordinates. This speeds up processes that rely on neighborhood relationships between points. |
Trajectory input |
Raw trajectory data provided by the system-specific software. Click on the Add button in order to select the input files in a standard dialog. The expected format of the trajectory information is SBET.OUT for the DJI L1 system. If a related accuracy file SMRMSG.OUT is available, TerraScan reads the information from both files. |
Input system |
Projection system of the input trajectory data. Click on the >> Button to open the Browse for Projection System dialog. The dialog provides a search option for projection systems as well as a list of all implemented systems. In addition, any user-defined projection systems are included in the list. |
Input elevations |
Elevation values of the input trajectory data: Ellipsoidal or Orthometric. Data collect with measurement systems is usually provided with ellipsoidal height values. |
Target system |
Projection system of the data for processing. Click on the >> Button to open the Browse for Projection System dialog. The dialog provides a search option for projection systems as well as a list of all implemented systems. In addition, any user-defined projection systems are included in the list. |
Target elevations |
Elevation values of the data for processing: Ellipsoidal or Orthometric. Data for delivery is usually provided with orthometric values of some local height model. |
Geoid model |
Model that provides the geoid correction. Transforms the elevation values of the input data from input to target elevation values. This is only active if any Input elevations setting differs from the Target elevations setting. |
Survey date |
Date when the data was captured. The format is day/month/year (dd/mm/yyyy). This is relevant for the conversion of time stamps when importing point cloud and trajectory data. |
Storage folder |
Location for storing the data related to the project. Click on the Browse button in order to select a folder in a standard dialog. |