

TerraPhoto User Guide
Compute depth maps
Not Lite
Compute depth maps command creates depth raster files for each image of the active image list. The pixels in the depth maps encode the distance between the camera position and the closest object represented by laser points or 3D vector elements.
Depth maps are stored in the \TEMP directory of the mission. The files have the extension .DPM. They can be used by several processes:
•deriving the approximate location of tie points if a tie point is entered in one image
•extraction of colors from images to laser points
•production of wall textures
•production of true orthophotos
To compute depth maps:
1. Select Compute depth maps command from the Utility pulldown menu.
The Compute Depth Maps dialog opens:
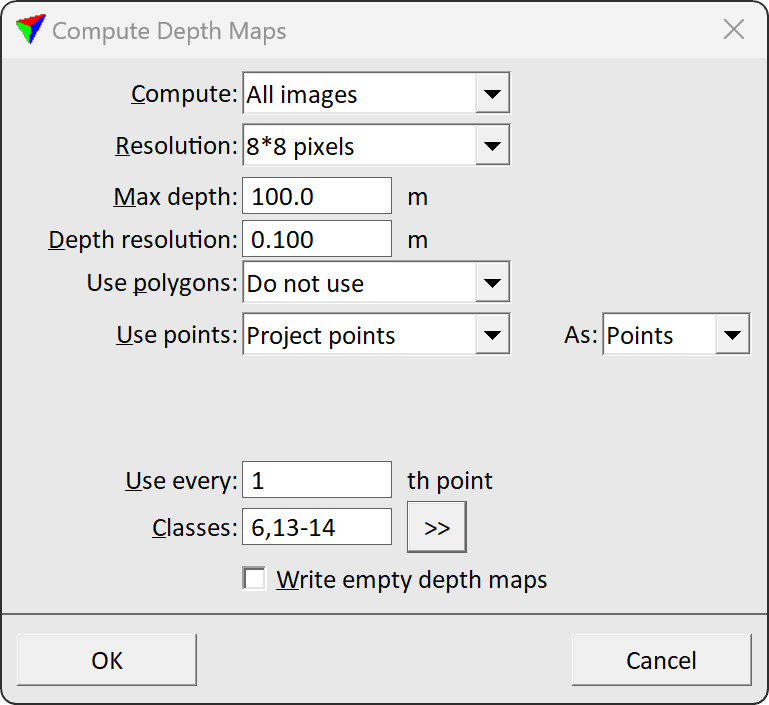
2. Define settings and click OK.
This starts the computation process. Depending on the amount of images and selected settings, the process may take some time. A progress bar shows the progress of the process.
SETTING |
EFFECT |
|---|---|
Compute |
Images for which depth maps are created: •All - all images of the active image list. •Selected - images selected in the active image list. •<camera name> - images captured by the selected camera. |
Resolution |
Pixel size of the depth maps related to the resolution of the raw images: •1x1 - one pixel in a depth map equals one pixel in a raw image. •2x2 - one pixel in a depth map equals the area of two times two pixels in the raw image. •... •20x20 - one pixel in a depth map equals the area of 20x20 pixels in the raw image. |
Max depth |
Maximum distance between the camera position and objects that are included in the depth maps. |
Depth resolution |
Accuracy of the depth value computation. Small values (about 1 mm for mobile data, 1 cm for airborne data) are required for collecting tie points for positional improvement. Bigger values (about 0.1 m to 1 m) can be used for the creation of wall textures and extraction of color values. |
Use polygons |
Determines whether selected 3D polygons are included in the depth maps computation of not. Selected is only active if the polygons are selected in the CAD file. |
Use points |
Determines the laser data source for computing depth maps: •Do not use - no laser points are used. •Loaded points - points that are loaded in TerraScan are used. This is only active if points are loaded in TerraScan. •Project points - points of the active project in TerraScan are used. This is only active if a project is loaded in TerraScan. |
As |
Defines how to use the points in depth map generation: •Points - each point projects only their own footprint to the depth map. •TIN - points are triangulated to a surface and the surface is projected to the depth map. Fills possible holes in the depth map caused by missing points. |
Within |
Time difference between a laser point and an image that determines whether the point is used for depth map computation or not. This is only active if Use is set to Close in time only. |
Use every |
Defines whether all laser points are used or only every Xth point. This is only active if Use points is not set to Do not use. |
Classes |
Defines which points are used related to classes. This is only active if Use points is not set to Do not use. |
|
Opens the Select classes dialog which contains the list of active classes in TerraScan. You can select multiple source classes from the list that are then used in the Classes field. |

Depth maps can be displayed using the View image window in TerraPhoto. The window is opened by the View images button from the TPhoto window or the View images command from the Utility pulldown menu.