

TerraScan User Guide
Cut turnarounds
Cut turnarounds command splits a trajectory into several trajectories that do not overlap themselves anymore. It can remove short trajectory segments after the process, if specified.
The available methods cut the trajectories based on their shape. The tool requires trajectory data only to perform the cut.
The tool offers different methods for cutting the trajectories at turnarounds:
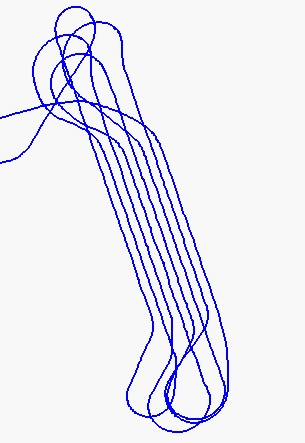
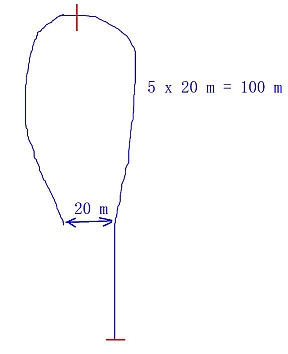
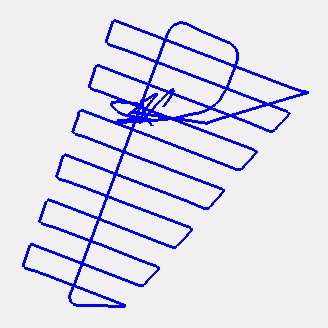
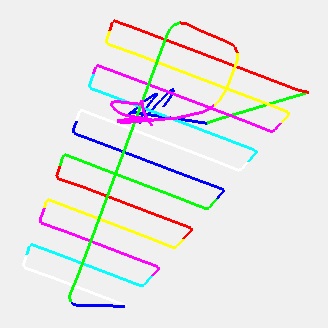
•Revisit: A trajectory is cut if the minimum length of a trajectory part is at least 5 times longer than the shortest distance between two neighboring trajectory lines. This split condition is illustrated in the third figure below.
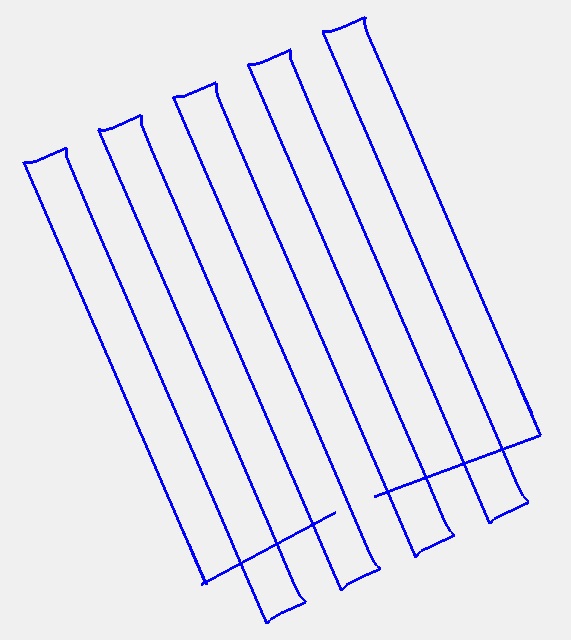
Original trajectory |
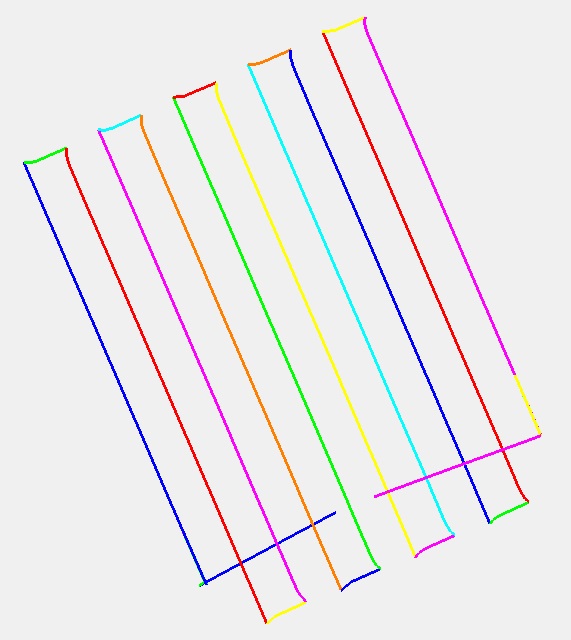
Resulting trajectories |
Split condition |

•Sharp turn: A trajectory is cut at each sharp turn along the trajectory path. Sharp turn pattern is often captured by drones, when the system stops during the flight to turn.
Original trajectory |
Resulting trajectories |
•Smooth turn: A trajectory is cut at each smooth turn along the trajectory path. Line spacing is used to estimate the turn radius for cuts. Smooth turn pattern is often captured by systems that keep moving while the system turns.
Original trajectory |
Resulting trajectories |
To cut trajectories at turnarounds:
1. (Optional) Select the trajectory file(s) you want to cut in the Trajectories window.
2. Select Cut turnarounds command from the Tools pulldown menu.
This opens the Cut Turnarounds dialog:
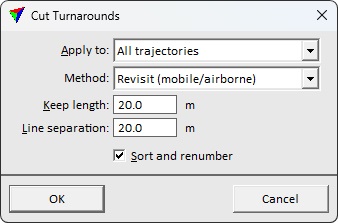
3. Define settings and click OK.
This splits trajectories. The application deletes the old trajectory file(s) and creates new files in the active trajectory directory.
SETTING |
EFFECT |
|---|---|
Apply to |
Trajectories effected by the process: All trajectories or Selected only. |
Method |
Method to cut trajectories: •Revisit (mobile/airborne) •Sharp turn (drone) •Smooth turn (drone/airborne) |
Keep length |
Minimum trajectory length to keep after separating lines. Shorter trajectory passes are removed. This is active only if Method is set to Revisit or Sharp turn. |
Line separation |
The distance separation between two lines running in parallel. This is active only if Method is set to Revisit. |
Line spacing |
Whether to use Automatic or User defined line spacing defining the gap between neighboring lines. User defined spacing can be useful when data collection pattern is irregular and spacing varies, making automatic measurement difficult. This is active only if Method is set to Smooth turn. |
Spacing |
User defined perpendicular spacing between lines. This is active only if Line spacing is set to User entry. |
Sort and renumber |
If on, trajectories are sorted by time and assigned new line numbers after the cut. |