

TerraScan User Guide
Create macro / For stops and turns
Create macro / For stops and turns command creates a TerraScan macro automatically. The macro is used to classify points of an MLS data set that were collected during stops or in sharp turns.
Since stops and turns cause a slowing-down of the vehicles speed, the scanner collects significantly more data than at normal operating speed. The command can be used to identify locations of stops and turns based on trajectory position attributes. If the search for stop and turns finds such locations, the resulting macro contains steps that classify points based on time intervals.
To create a macro for stops and turns:
1. Select Create macro / For stops and turns command from the Tools pulldown menu.
This opens the Macro for Stops and Turns dialog:
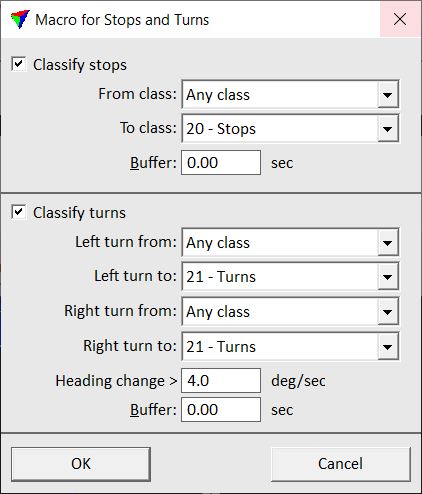
2. Define settings and click OK.
The software computes stops and turns from the trajectory positions and creates a TerraScan macro. An information dialog shows the number of added time intervals.
The macro can be saved and applied to the laser points. See Chapter Macros for more information about macros in TerraScan.
SETTING |
EFFECT |
|---|---|
Classify stops |
If on, the software searches for stops. |
From class |
Point class(es) from which to classify points. The list contains the active point classes in TerraScan. |
To class |
Target class for points collected during stops. The list contains the active point classes in TerraScan. |
Buffer |
Number of seconds that is added to each stop time interval. The seconds are added at the beginning and in the end of a stop. |
Classify turns |
If on, the software searches for turns. |
Left turn from |
Point class(es) from which to classify points collected during turns to the left. The list contains the active point classes in TerraScan. |
Left turn to |
Target class for points collected during a turns to the left. The list contains the active point classes in TerraScan. |
Right turn from |
Point class(es) from which to classify points collected during turns to the right. The list contains the active point classes in TerraScan. |
Left turn to |
Target class for points collected during a turns to the right. The list contains the active point classes in TerraScan. |
Heading change |
Minimum change in heading angle that defines a turn. As long as the heading angle between consecutive trajectory positions changes more than the given degree value per second, the change is considered a turn and the respective time stamps are added to the macro step. |
Buffer |
Number of seconds that is added to each turn time interval. The seconds are added at the beginning and in the end of a turn. |