

TerraScan User Guide
Thin points
Thin points command reduces unnecessary point density by removing some of the points which are close to each other or within a grid cell of a given size.
The thinning method which relies on point density tries to find groups of points where all the points are within the given horizontal distance and elevation difference from a central point in the group. Alternatively, the thinning can be done based on a 2D or 3D grid. Then, one point per grid cell is kept. This may be useful to thin a point cloud to a specific density, for example, to 1 point per square meter in selected areas. The 2D grid method is optimized for airborne data. The 3D grid method is developed for mobile data but not yet optimized for achieving a homogeneous point density.
Another setting of the command determines which point in each group or grid cell is kept. The Keep methods for groups that rely on the point cloud geometry are illustrated in the following figures:
Groups of points |
Highest point in each group |
Lowest point in each group |
Central point in each group |
Created average for each group |





Additional options are to keep points with the highest or lowest intensity value, points with the earliest or latest time stamp, points with the smallest or biggest distance value or points from a given class.
The removed points can be either deleted or classified into another point class.
To thin points:
1. Select Thin points command from the Tools pulldown menu.
This opens the Thin Points dialog:
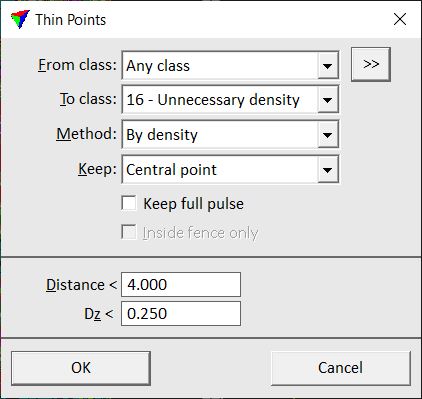
2. Define settings and click OK.
This thins the point cloud.
SETTING |
EFFECT |
|---|---|
From class |
Point class(es) from which to thin out unnecessary points. |
|
Opens the Select classes dialog which contains the list of active classes in TerraScan. You can select multiple source classes from the list that are then used in the From class field. |
To class |
Class into which removed points are classified. Alternatively, you can select the Delete option in order to delete the points completely from the point cloud. |
Method |
Thinning method: •By density - thinning based on distance and elevation difference between points. •2D Grid - thinning based on a 2D grid. One point per grid cell is kept. •3D Grid - thinning based on a 3D grid. One point per grid cell is kept. Developed for mobile point clouds. •By order - thinning based on point order. The common order of LiDAR point clouds is by time stamp, but any other order, for instance created by the Sort command, is possible. •Average density - thinning based on distance and elevation difference between points. Chooses suitable thresholds based on the average spacing within the point cloud. |
Keep |
Defines which point to keep in each group of points: •Highest point - point with highest elevation. •Median Z point - point with median elevation value. •Lowest point - point with lowest elevation. •Central point - point closest to the center of the group. If Method is set to 2D Grid, the point closest to the central XYZ location of points in a grid cell is kept. •Create average - substitute group by creating an average point. •Biggest distance - point with biggest distance value. This requires the computation of distance values. •Smallest distance - point with smallest distance value. This requires the computation of distance values. •Highest intensity - point with highest intensity value. •Lowest intensity - point with lowest intensity value. •First in time - point with earliest time stamp. •Last in time - point with latest time stamp. •First echo - point with the lowest return number. •Last echo - point with the highest return number. •Random - random selection of a point to keep. •points of a specific point class. |
Keep full pulse |
If on, all points of the same pulse are kept if the software decides to keep one point of a pulse. |
Inside fence only |
If on, only points inside a fence or selected polygon are effected by the process. Requires a fence or a selected polygon in the CAD file. |
Distance |
Horizontal distance limit between two points. This is active only if Method is set to By density. |
Dz |
Elevation difference limit between two points. This is active only if Method is set to By density. |
Grid step |
Size of a grid cell. This is active only if Method is set to 2D Grid or 3D Grid. |
