

TerraScan User Guide
Air points
Not Lite
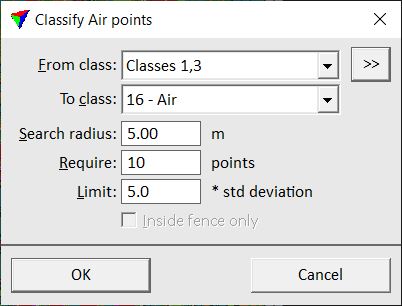
Air points routine classifies points which are clearly higher than the median elevation of surrounding points. It can be used to classify noise up in the air.
For each point, the routine finds all neighbouring points within a given search radius. It computes the median elevation of the points and the standard deviation of the elevation values. A point is classified as air point if it is more than the standard deviation multiplied by a given factor above the median elevation. The comparison using the standard deviation results in the routine being less likely to classify points in places where there is more elevation variation.
SETTING |
EFFECT |
|---|---|
From classes |
Source class(es). Select several classes by pressing the Ctrl-key while selecting a class from the list. |
To class |
Target class. |
Search radius |
2D search radius around a point. For points within this radius the median elevation and standard deviation are computed. Normally a value between 2.0 - 10.0 m. |
Require |
Minimum amount of points required within the Search radius. A point is not classified if there are not enough points within the search radius. |
Limit |
Factor for multiplication with the standard deviation of elevation values within the search radius. A point is classified, if it is more than Limit * std deviation above the median surface of the points in the search radius. |
Inside fence only |
If on, only points inside a fence or selected polygon(s) are classified. |